PID-regeling wordt gebruikt om een gecontroleerde variabele (bijv. druk, temperatuur, frequentie, enz.) aan te passen aan het setpoint. Deze PID-regelaars zijn van groot belang voor pompbesturing, omdat ze de snelheid van de pomp als een geïntegreerd onderdeel regelen en zo een automatische werking mogelijk maken met alle voordelen van dien.
Hoe PID werkt
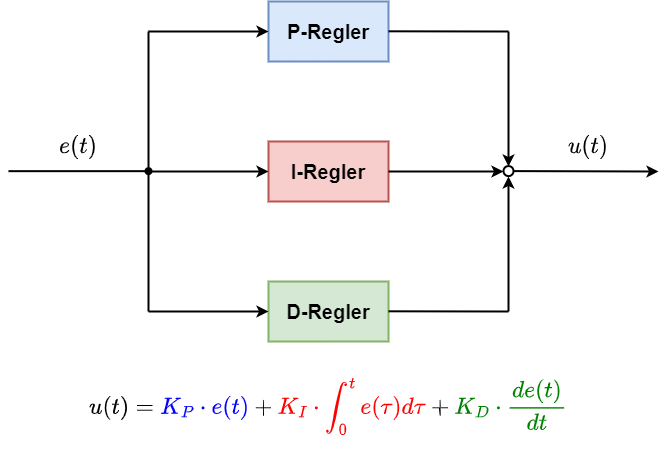
De PID-regelaar gebruikt drie elementen, het P-element (proportionele component), het I-element (integrale component) en het D-element (differentiële component). De proportionele component regelt op basis van het verschil tussen het setpoint en de werkelijke waarde.
Hoe dichter de werkelijke waarde het setpoint benadert, hoe lager de frequentie van de pomp wordt geregeld. Theoretisch wordt de doelwaarde nooit bereikt. De integrale component lost het probleem op dat de werkelijke waarde het instelpunt benadert, maar niet bereikt, omdat het correctiesignaal groot genoeg is, zelfs bij kleine verschillen tussen het instelpunt en de werkelijke waarde. Het integrale deel integreert dus het verschil.
De differentiële component versterkt kortstondig het signaal van het verschil tussen de werkelijke waarde en de instelwaarde, zodat de respons van de regelaar kortstondig wordt versneld. De D-component wordt alleen aanbevolen als het gewenste resultaat niet wordt bereikt met PI-regeling.
Universele controller
De PID-regelaar staat ook bekend als een universele regelaar vanwege zijn brede toepassingsgebied en gedifferentieerde werkingsmodus. Het kan heel goed worden aangepast aan verschillende gecontroleerde systemen en is daarom een oplossing voor verschillende uitdagingen.
Als alle koppelingen worden gebruikt, wordt de PID-regelaar gekenmerkt door een snelle reactie op verschillen (door de D-component), een doelgerichte opstart (door de P-component) en een nauwkeurige regeling dicht bij het setpoint (door de I-component). Managementgedrag is dienovereenkomstig onderverdeeld in drie gebieden.